Le quadrivecteur ( v ) (noté v pour le distinguer du
vecteur ordinaire v).
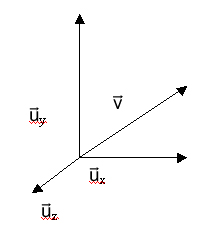
1. Un vecteur est défini dans une base par rapport à un repère : v = vx ux + vy uy + vz uz





2. Un quadrivecteur est un objet à quatre grandeurs comportant 3 coordonnées d’espace et ct (c fois le temps). Ci-dessous le quadrivecteur position.

 Dans un espace tridimensionnel, le produit
scalaire de deux vecteurs est donné par :
Dans un espace tridimensionnel, le produit
scalaire de deux vecteurs est donné par :
 Et la norme de v est le produit scalaire de
v avec lui-même :
Et la norme de v est le produit scalaire de
v avec lui-même :

Pour les quadrivecteurs, le produit scalaire est :

Sa norme est le produit du vecteur par lui-même :

On voit que, curieusement, le carré de la norme du quadrivecteur peut être quelque chose de négatif si la somme des v(x,y,z) est supérieure à celle de v(t) !
Considérons le 4-vecteur position
r. Ses coordonnées :

Sa norme est :

Plaçons-le dans un repère :



Différence des temps et des positions de A et B.

v = dr /dt ou en trois dimensions :

1. Un vecteur est défini dans une base par rapport à un repère : v = vx ux + vy uy + vz uz
vx
ou v vy
vz u est le vecteur unitaire.
Sur un vecteur, on peut opérer des
changements de base :
v = v’x u’x + v’y u’y + v’z u’z

Une rotation comme celle ci-dessus, est
obtenue par la
matrice :

Sur un vecteur, de telles
transformations sont possibles. C’est le cas pour la position, la vitesse, etc.
Ce n’est pas le cas pour la pression, la température, etc qui ne sont pas des
quantités vectorielles (mais scalaires).
L’intérêt de la notion de vecteur c’est que, parce que les membres de
l’égalité se transforment de la même façon, cette égalité reste vraie
dans tous les référentiels.
Soit F = m a La
formule reste vraie quel que soit le référentiel. On a au départ les
coordonnées vectorielles du vecteur F

On opère la transformation en deux temps :

On voit que si (comme dans les coordonnées de départ) le
membre droit de la première matrice M est égal au membre droit de la deuxième
matrice M, quand on multiplie cette égalité par la matrice M, on obtient que le
membre gauche de la première matrice est égal à M fois le premier membre de la
matrice de droite.
L’objectif est d’écrire les lois de la physique comme des quadrivecteurs
afin de garantir leur généralité quelque soit le référentiel.
2. Un quadrivecteur est un objet à quatre grandeurs comportant 3 coordonnées d’espace et ct (c fois le temps). Ci-dessous le quadrivecteur position.

Les nouvelles coordonnées sont alors : ct’ = gct – bgx = g
(ct – bx)
x’ = -gbct
+gx = g
(x – bct)
y’ = y
z’ = z
Ci-dessus la transformation de Lorentz.
Ci-dessous une transformation par rotation d’angle q autour de l’axe z.

Pour les quadrivecteurs, le produit scalaire est :

Sa norme est le produit du vecteur par lui-même :
On voit que, curieusement, le carré de la norme du quadrivecteur peut être quelque chose de négatif si la somme des v(x,y,z) est supérieure à celle de v(t) !
Conséquence : LE CÔNE DE LUMIÈRE ;
Sa norme est :
Plaçons-le dans un repère :
En rouge : ||r||² = 0 Ce qui
est ici défini c’est le cône de lumière.
En vert : ||r||²> 0 C’est
l’intérieur du cône de lumière.
En bleu : ||r||² < 0 C’est
l’extérieur du cône de lumière
(Sur la
base ci-contre, y et z = 0. Tout dépend
donc de ct et de x.

Soient 2 événements A et B. Un
4-vecteur est associé à chaque événement. On fait la différence rA
– rB et on calcule la norme du vecteur || rA
– rB||² :
ou
Différence des temps et des positions de A et B.
On est dans le cône si la distance qui sépare A et B dans le temps est telle que la lumière a le temps de la parcourir. L’information au
départ de A a le temps à la vitesse
c de rejoindre B. Ici, || rA – rB||² >
0
A peut
être la cause de B. L’intervalle est du genre temps.
On est hors
du cône si A et B sont tellement distants dans le temps que la lumière n’a pas
le temps de joindre l’un à l’autre. || rA – rB||² <
0
A ne
peut être la cause de B. L’intervalle est du genre espace.
On est
aux limites du cône si la distance qui sépare A de B dans le temps est
juste égale au temps qu’il faut à la lumière pour les joindre. || rA
– rB||² = 0. Nous sommes dans le genre lumière. A
et B ne sont pas pour autant simultanés puisqu’il aura fallu à la
lumière un certain temps pour les relier à 300 000 km/s.
Remarque : soient deux événements simultanés
(D t = 0) mais qui ont lieu en des endroits différents (d
> 0) sont du genre espace et ne peuvent être cause l’un de l’autre
(puisque c(Dt) < d).
[Retour au chapitre 9 La relativité restreinte]
[Retour au chapitre 9 La relativité restreinte]
Remarque : l’intervalle || rA
– rB||² est un invariant relativiste. Il reste
le même dans tous les référentiels (en mouvement uniforme relatif).
De même pour la pseudo-norme du quadrivecteur :
Le quadrivecteur vitesse.
Le vecteur vitesse correspond à la dérivée du vecteur position
par rapport au temps :v = dr /dt ou en trois dimensions :
{kind=link}
Aucun commentaire:
Enregistrer un commentaire